Как снизить обороты асинхронного двигателя?
Как можно регулировать обороты асинхронного двигателя: обзор способов
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.

Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
- Изменение скорости АД с короткозамкнутым ротором
- Частотное регулирование
- Переключение числа пар полюсов
- Способы управления скоростью АД с фазным ротором
- Изменение питающего напряжения
- Активное сопротивление в цепи ротора
- Асинхронный вентильный каскад и машины двойного питания
- Плавный пуск асинхронных электродвигателей
- Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
 Достоинствами данного метода являются:
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.

В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.

Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
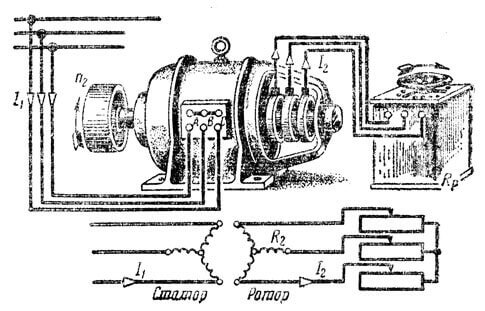
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.

Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.

Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Регулирование скорости асинхронного двигателя
Наиболее распространены следующие способы регулирования скорости асинхронного двигателя : изменение дополнительного сопротивления цепи ротора, изменение напряжения, подводимого к обмотке статора, двигателя изменение частоты питающего напряжения, а также переключение числа пар полюсов.

Регулирование частоты вращения асинхронного двигателя путем введения резисторов в цепь ротора
Введение резисторов в цепь ротора приводит к увеличению потерь мощности и снижению частоты вращения ротора двигателя за счет увеличения скольжения, поскольку n = n о (1 — s).
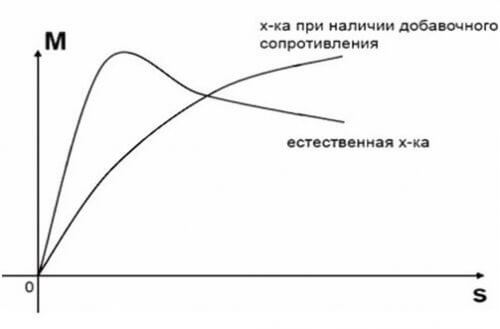
Из рис. 1 следует, что при увеличении сопротивления в цепи ротора при том же моменте частота вращения вала двигателя уменьшается.
Жесткость механических характеристик значительно снижается с уменьшением частоты вращения, что ограничивает диапазон регулирования до (2 — 3) : 1. Недостатком этого способа являются значительные потери энергии, которые пропорциональны скольжению. Такое регулирование возможно только для двигателя с фазным ротором.
 Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре
Изменение напряжения, подводимого к обмотке статора асинхронного двигателя , позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U 1ном и статором электродвигателя включается регулятор напряжения .
При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент М кр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения U рет (рис. 3 ), а скольжение от U рег не зависит.

Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора

Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре

Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора
Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении Uном или на холостом ходу.
Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до n кр.
Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения.

Рис. 4. Схема замкнутой системы регулирования скорости тиристорный регулятор напряжения — асинхронный двигатель (ТРН — АД)
Замкнутая схема управления асинхронным двигателем , выполненным по схеме тиристорный регулятор напряжения — электродвигатель позволяет регулировать скорость асинхронного двигателя с повышенным скольжением (такие двигатели применяются в вентиляционных установках).
Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения
Так как частота вращения магнитного поля статора n о = 60 f /р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения.
 Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость n о магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью.
Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте.
Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6.

Рис. 5. Схема частотного электропривода

Рис. 6. Механические характеристики асинхронного двигателя при частотном регулировании
С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения.
Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 — 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения.
 Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления.
Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока.
Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты I вых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции.
Регулирование частоты вращения асинхронного двигателя переключение числа пар полюсов
Ступенчатое регулирование скорости можно осуществить, используя специальные многоскоростные асинхронные двигатели с короткозамкнутым ротором.
Из выражения n о = 60 f /р следует, что при изменении числа пар полюсов р получаются механические характеристики с разной частотой вращения n о магнитного поля статора. Так как значение р определяется целыми числами, то переход от одной характеристики к другой в процессе регулирования носит ступенчатый характер.
Существует два способа изменения числа пар полюсов. В первом случае в пазы статора укладывают две обмотки с разным числом полюсов. При изменении скорости к сети подключается одна из обмоток. Во втором случае обмотку каждой фазы составляют из двух частей, которые соединяют параллельно или последовательно. При этом число пар полюсов изменяется в два раза.

Рис. 7. Схемы переключения обмоток асинхронного двигателя: а — с одинарной звезды на двойную; б — с треугольника на двойную звезду
Регулирование скорости путем изменения числа пар полюсов экономично, а механические характеристики сохраняют жесткость. Недостатком этого способа является ступенчатый характер изменения частоты вращения асинхронного двигателя с короткозамкнутым ротором. Выпускаются двухскоростные двигатели с числом полюсов 4/2, 8/4, 12/6. Четырехскоростной электродвигатель с полюсами 12/8/6/4 имеет две переключаемые обмотки.
Использованы материалы книги Дайнеко В.А., Ковалинский А.И. Электрооборудование сельскохозяйственных предприятий.
Если Вам понравилась эта статья, поделитесь ссылкой на неё в социальных сетях. Это сильно поможет развитию нашего сайта!
Не пропустите обновления, подпишитесь на наши соцсети:
Как снизить обороты вытяжного вентилятора
Вот характеристики с этикетки:
Volage -220v
Power — 25w
Electrical Frenguency — 50Hz
Что можно придумать? может поставить в цепь выключатель света с регулятором?
Если двигатель асинхронный то понизить напряжение.Понижающий трансформатор,ЛАТР.
Симисторный регулятор может вызвать гудение(ток не синусоидальный),надо проверять.
Световые регуляторы работают от 0 до 220в и имеют в основном линейную регулировочную характеристику переменного резистора.Выключатель от 0в.
Вентиляторные от 110-220в ,выключатель от 220в чтобы вентилятор стартовал от максимального момента ,и логарифмическую характеристику переменного резистора(сопротивление раза в 2 и более ниже).
Так как многие асинхронники не стартуют от 140-150в то ставят подстроечный резистор для стартового напряжения конкретного вентилятора.И основная регулировка происходит в диапазоне 160-200в,поэтому этот участок регулировки должен быть растянут.
Так что переделать турецкий диммер в вентиляторный регулятор вполне по силам радиолюбителю.
Световые регуляторы ставить нельзя.
Симисторный регулятор можно купить за 1500-2000руб — самый лучший вариант по-моему.
типа MTY 1.5
Но есть 1 неприятный момент — на низких оборотах вентилятор начинает гудеть, т.к. симистор режет синусоиду тока.
Чем ниже обороты, тем как правило сильнее гудит.
А конденсатор металлобумажный в разрыв провода забыли предложить? Вопрос вообще копеечный.
Главное чтоб были рассчитаны на 400 Вольт. Ёмкость подбирать от 0.5 до 2 мкФ.
Я поставил последовательно пару по 1 мкФ на 250 Вольт. В старых чешских телефонных розетках были.
По факту получилось 0.5 мкФ 500 Вольт. Помогло.
Тоже сейчас задался таким вопросом. Турецкий диммер попробовал — обороты уменьшаются, но, действительно, появляется гул. Да и сгорел он через 3 минуты работы. Понравилась идея с конденсатором — что, в самом деле, все так просто? Спасибо, надо попробовать!
Вадим М ; Я же говорил обычный диммер ставить нельзя)))
Вадим М написал :
Турецкий диммер попробовал — обороты уменьшаются, но, действительно, появляется гул. Да и сгорел он через 3 минуты работы.
А у меня переделанный уже 5 лет работает.Чему там гореть?Если симистор на ток 16А а вентилятор потребляет миллиамперы и радиатор не нужен?Бу-га-га.
Динистору?Только если бракованный.
Гул идёт и от фирменного вентиляторного симисторного регулятора ,который втрое дороже-имею и такой.Принцип работы у них абсолютно одинаковый-ток на выходе не синусоидальный.
С конденсатором просто но нет плавной регулировки.Хоть пакетник ставь.
Ах да есть старинная древняя схема диммеров с которой индукционная нагрузк типа асинхронников и коллекторных дв не работает.
Но в современных схемах она не применяется-деталей много.
gotman написал :
Я же говорил обычный диммер ставить нельзя)))
Не говори ерунду!Смотри схему!
Брак,левак и косяк никто не отменял.
Popadopulos написал :
С конденсатором просто но нет плавной регулировки.
Плавная и не нужна. Подобрал чтоб сильно вентилятор не завывал да и ладно.
FAV1976 написал :
Плавная и не нужна. Подобрал чтоб сильно вентилятор не завывал да и ладно.
Во, именно такой результат и нужен мне.
Оба на ноль вешать?
Какой из этих » > подойдёт для моего вентилятора?
Погуглил, пишут что -Ни в коем случае НЕ ИСПОЛЬЗОВАТЬ электролитические конденсаторы.
Оба или сколько- как подберете. На ноль или на фазу пофигу.
Нужны МБ конденсаторы. Они не полярные.
Быстрее из плат от мониторов и телеков надергаешь.
А дальше методом последовательно-параллельного соединения конденсаторов найдёте то что надо.
FAV1976 , не могли бы Вы написать для несведущих, какой конкретно маркировки конденсаторы надо брать? Чтобы можно было придти на Митинский радиорынок и сказать: «Дайте мне конденсатор такой-то на 1 микрофарад 400 вольт». А то старых телевизоров и мониторов под рукой сейчас нет, а чехословацкие телефонные розетки видел последний раз в детстве (и то, по-моему, они были польскими и болгарскими  ) Благодарю за помощь!
) Благодарю за помощь!
PS: кстати, а подстроечных таких конденсаторов не бывает?
В чипе упоминаются тут:
» >
Только в наличии нету.
А вот тут картинок много:
» >
Бывают и такие.
Смотри ёмкость и напряжение.
FAV1976 написал :
Нужны МБ конденсаторы. Они не полярные.
Чем плёночные не угодили: » > ?
Я бы для этих целей лучше-бы применил специально предназначенный для этого автотрансформатор: » >
Designman ; А мотор гудеть, как с диммером не будет?
Designman , Предложили бы сразу транс от сварочного аппарата.
Вадим М , Во всех кухонных вытяжках для ступенчатой регулировки оборотов вентилятора производители используют именно конденсаторы.
Митинский сегодня работает. До обеда уже всё сделаете.
Вадим М написал :
А мотор гудеть, как с диммером не будет?
FAV1976 написал :
Designman, Предложили бы сразу транс от сварочного аппарата.
Зато отдают его почти даром 
FAV1976 написал :
Во всех кухонных вытяжках для ступенчатой регулировки оборотов вентилятора производители используют именно конденсаторы.
Да?А у меня Фокс имеет нормальный асинхронный мотор с 3 переключаемыми обмотками.
Даже паршивый китайский вентилятор за 6 долларов имеет 3 обмотки для переключения скорости.
Вадим М написал :
а подстроечных таких конденсаторов не бывает?
Нет.Вам подойдёт любой не полярный конденсатор.Скажите для асинхронного двигателя и параметры-там поймут.
Колхозники с конденсаторами! Специально предназначенные регуляторы никто предложить не догадался? » >
Если с конденсаторами получится уменьшить обороты без ущерба для двигателя, то почему бы и не «поколхозить». Спасибо всем за пракиическую помощь, как в Митино за конденсаторами выберусь, обязательно отчитаюсь о результате модернизации своего шумящего агрегата.
Совок все еще правит балом, даже в Москве 
Вадим М написал :
Спасибо всем за пракиическую помощь, как в Митино за конденсаторами выберусь
Напруга не менее 400В кстати. Лучше 660В. А емкость то какую брать будешь?
andrewkhv написал :
Специально предназначенные регуляторы никто предложить не догадался?
Они тиристорные — гудят на частичных режимах не по децки. А товарищу нужно задавить вент. именно из-за шума.
Даже когда дБ не много — они жутко раздражают, ибо по спектру как раз попадают в противную область частот.
Vladimir_Vas написал :
Они тиристорные — гудят на частичных режимах не по децки.
А чем этот плох? » >
tsv ; Прежде всего, ценой.
Да.Одни асинхронные двигатели гудят ,другие не очень.Зависит от конструкции.Другие даже крутится не хотят.
«В каталоге Вентса есть 2 модели регуляторов скорости вентиляторов, с монтажом в стандартный подрозетник: » >
Вопрос: чем эти регуляторы отличаются от обычных диммеров?»
Чем они от турецкого диммера отличаются я выше описал и лично переделывал турецкий диммер по образцу Вентса(симистор,динистор,2 конденсатора,4 резистора,переменный резистор-выключатель,подстроечный резистор,предохранитель,и конденсатор или варистор).Бу-га-га ничем от диммера практически не отличается.
Формой синусоиды от диммера как раз не отличается.
Идеальный не частотный регулятор синусоидального напряжения ЛАТР или регулируемый Лабораторный автотрансформатор(есть маленькие).Позволяет получить на выходе 250в и немного даже повысить частоту оборотов асинхронного вентилятора от номинального.
Для некоторых дюже вумных -частота вращения вентилятора с асинронником зависит от сопротивления и момента на валу.А момент зависит. сами найдёте.
Так что таки да -разгоняет.Ещё как разгоняет!
Чипгуру
- Форум
- Правила форума
- Правила для Редакторов
- Правила конкурсов
- Руководство барахольщика
- Ликбез по форуму
- Изменить цвет форума
- Как вставлять фотографии
- Как вставлять ссылки
- Как вставлять видео
- Как обозначить оффтоп
- Как цитировать
- Склеивание сообщений
- Значки тем
- Подписка на темы
- Автоподписка на темы
- БиБиКоды (BBCode)
- Полигон для тренировок
- Калькуляторы
- Металла
- Обороты, диаметр, скорость
- Подбора гидроцилиндров
- Развертки витка шнека
- Расчёт треугольника
- Теплотехнический
- Усилия гибки
- Каталоги
- Подшипников
- Универсально-сборные пр.
- УСП-12
- Справочники
- Марки стали и сплавы
- Открытая база ГОСТов
- Применимость сталей
- Справочник конструктора
- Справочник ЧГ сталей
- Сравнение материалов
- Стандарты резьбы
- Таблицы
- Диаметров под резьбу
- Конусов Морзе
- Номеров модульных фрез
- Темы без ответов
- Активные темы
- Поиск
- Наша команда
О частотном регулировании асинхронного привода.
- Перейти на страницу:

О частотном регулировании асинхронного привода.
Сообщение #1 T-Duke » 10 фев 2016, 16:37
Так как вижу что в соседней теме возникают некоторые споры и даже заблуждения, решил создать отдельную тему, где моя темность осветит некоторые вопросы связанные с асинхронным приводом. Буду стараться говорить простыми словами на пальцах. Всяких дотошных буквоедов, которые цепляются к тому о чем не упомянул для экономии места и времени — прошу идти мимо. Я не собираюсь здесь писать монографию из многих глав, описывая каждый нюанс. Только главное, важное для понимания. Так же для тех кому нечего делать, или хочется холиварить , прошу, не нужно превращать этот форум в подобие чипа. Троллям там самое место, а здесь хочется конструктивно общаться и если кому, что непонятно — задавйте вопросы.
О роторе.
Итак самое главное что нужно сказать и с чего нужно начать. Асинхронные двигатели работают при наличии такого явления как скольжение поля. Когда вращающееся магнитное поле статора по скорости вращения, опережает ротор.
Только при наличии скольжения в беличьем колесе ротора наодится ЭДС и возникает крутящий момент. Детально углубляться не будем. Главное что нужно понимать — если скольжение равно нулю, то есть ротор верится с той же скоростью, что и поле статора, то крутящий момент тоже нулевой.
Второе, что важно понимать — для конкретного двигателя есть предельная величина скольжения. При таком скольжении крутящий момент ротора максимален. Если еще больше увеличить скольжение, то момент начинает падать. Графики момента в зависимости от скольжения (скорости ротора) можно найти в учебниках. Классический пример запуск 50Гц асинхронника от сети 50Гц при большой нагрузке на валу. В начальный момент скольжение очень велико. Ибо ротор почти неподвижен, а поле вертится с полной частотой. Скольжение значительно выше предельного и крутящий момент сильно ниже, чем в случае предельного скольжения. Это объясняется резким ростом потерь в роторе при превышении критического скольжения.
Итак, чтобы получать максимально возможный момент асинхронника во всем диапазоне скоростей, ПЧ должен строго поддерживать одну и ту же величину скольжения — то есть предельное скольжение, или его можно назвать оптимальным. С такой задачей может справиться только векторный частотник. Если двигатель управляется векторным частотником, то там даже при частоте в несколько Гц, возможен полный крутящий момент. Если частотник не векторый, а обычный, у которого нет ОС по скорости ротора, скольжение ротора будет произвольно меняться в зависимости от нагрузки на двигатель, и оптимального момента во всем диапазоне оборотов мы не получим.
Второй важный фактор — статор двигателя. Вернее то, что он электрически представляет собой для сети переменного тока, или для ПЧ. Электрически двигатель собой представляет индуктивность, последовательно включенную со сопротивлением обмоток. И параллельно ко всему этому подключена распределенная межвитковая емкость. Для этой темы емкость обмоток не играет роли, поэтому будем рассматривать статор двигателя как индуктивность и сопростивление включенное последовательно с индуктивностью. Важный момент здесь — номинальная частота, на которую изготовлен двигатель и номинальне напряжение питания в рекомендованном подключении. например частота 50Гц, напряжение 380В — звезда.
Чтобы понять поведение двигателя при изменении частоты протекающего через него тока, для начала проведем эксперимент. Вытащим из двигателя ротор, оставим только статор и будем подавать в двигатель переменный ток различной частоты. Зачем убираем ротор? Когда поговорим об асинхроннике как о трансформаторе станет понятно. Убрав же ротор из асинхронника, мы превращием его в банальный дроссель.
Итак убрали ротор и подали на двигатель номинальное напряжение, номинальной частоты, скажем 50Гц. Через обмотки статора начнет течь ток ХХ двигателя и вокруг полюсов статора начнет вращаться магнитное поле с частотой обратной пропорциональной числу пар полюсов. В двухполюсном двигателе частота вращения поля совпадает со сетью — 50Гц. В 4-х полюсном в 2 раза меньше 25Гц, во 8-ми полюсном 12.5Гц и т.д. Но сейчас это не важно. Важно понять что статор предназначен для создания внутри своего объема, вращающегося магнитного поля заданной частоты и силы.
Так вот статор двигателя включен в сеть 50Гц, на которую он рассчитан и по обмоткам течет некий ток ХХ. Возникает вопрос — А что если мы частоту тока сети уменьшим, или увеличим? Возьмем и подадим вместо номинальных 50Гц, частоту 25Гц. Что-то изменится. А именно уменьшится сопротивление обмоток двигателя переменному току. Ровно в 2 раза. Ток ХХ вырастет в два раза. Если подадим на обмотки ток с частотой 100Гц, то сопротивление обмоток увеличится и ток ХХ упадет в 2 раза. То есть статор асинхронника без ротора, ведет себя как классический дроссель — обыная индуктивно-резистивная нагрузка в сети переменного тока.
Об асинхронном двигателе, как о вращающемся трансформаторе.
А теперь первый раз проведу аналогию между асинхронником и трансформатором. Пока на роторе нет нагрузки и ротор вращается равномерно, для сети переменного тока (или ПЧ) двигатель представляет собой аналог первичной обмотки трансформатора включенного в сеть переменного тока. При чем вторичная обмотка которого нагружена на довольно большое сопротивление, представляющее собой различные потери.
Пока на вторичной обмотке обычного транса нет нагрузки, то первичная обмотка ведет себя как дроссель большой индуктивности. Через первичку протекает небольшой ток ХХ, его еще называют током намагничивания.
То же самое и с асинхронником. Пока нагрузки на валу нет, то через обмотку статора протекает небольшой ток ХХ, создающий вращающееся магнитное поле в статоре и компенсирующий разные потери, например на трение в подшипниках.
Снова вернемся к обычному трансу, но теперь во вторичку включим нагрузку, например лампочку. Это моментально приведет к тому, что первичная обмотка почувствует эту нагрузку и отреагирует на это тем, что уменьшит свой имеданс переменногому току. Строго говоря тут нужно говорить не об импедансе, а о принципах работы трансформатора. Но чтобы короче — будем думать, что меняется импеданс, что в принципе тоже правильно, если не вдаваться в детали. То есть как только появится нагрузка на вторичке, в первичке сразу подскочит потребление тока. Аналогичная ситуация с асинхронником. Как только мы дадим нагрузку на ротор, это моментально скажется на обмотке статора и ток через обмотку увеличится, для компенсации воздействия нагрузки.
То есть асинхронный двигатель являет собой вращающийся трансформатор сразу преобразовывающий переменный ток в механическую работу на выходе. Первичкая обмотка такого транса — обмотка статора. Вторичная обмотка — беличье колесо в роторе. Выход не электрический а механический.
Об управлении асинхронным приводом.
Теперь когда мы понмаем, что асинхронник это по сути трансформатор, хоть и своеобразный, рассмотрим работу такого транса на разных частотах.
Если мы подаем на ненагруженный транс номинальную частоту 50Гц, то через первичку течет номинальный ток ХХ. Если уменьшаем частоту до 25Гц, то через транс начинает течь ток ХХ в два раза выше. То есть на ровном месте ток становится выше в два раза. Нагрев обмотки от холостого тока растет уже в четыре раза, по закону Джоуля-Ленца. То есть мы ничего не меняли кроме частоты. Нагрузку не подключали, а ток уже вырос.
Если еще уменьшим частоту, например до 12.5Гц, то ток ХХ вырастет в 4 раза по сравнению с номинальным при 50Гц. Нагрев обмотки током ХХ вырастет уже в 16 раз. То есть видим, что тут что-то нужно делать.
Выход есть. Он называется законом управления V/f = const. Если мы изменяем частоту которой питаем трансформатор, то мы должны изменить и напряжение подаваемое на транс, чтобы не менялся ток через первичку. То есть, если мы питаем двигатель рассчитанный на 380В и 50Гц, от сети частотой 25Гц, то напряжение в этой сети должно составлять уже половину — 190В. Иначе двигатель будет работать в нерасчетном режиме, с большими потерями как в меди, так и в стали статора.
Главный вывод из этого — при уменьшении частоты тока питающего двигатель — необходимо уменьшать напряжение подаваемое на этот двигатель. Этим и занимаются частотники. Когда мы выкручиваем регулятор на 25Гц, частотник вместо положенных 220В дает уже 110В и двигатель работает в своих номинальных параметрах.
А как же на счет крутящего момента ротора? А ему наплевать на напряжение, которым питают статор двигателя. Ротору нужно скольжение и номинальная индукция поля. Если нужное скольжение обеспечено, и хватает тока через обмотки для создания номинальной индукции поля, то обеспечен и номинальный крутящий момент. То есть, если мы питаем асинхронник током частоты 25Гц и напряжением 110В, то это никак не сказывается на крутящем моменте, если скольжение не изменилось.
Этот факт и говорит о том, что векторный частотник может давать хороший момент на низах, вплоть до нескольких Гц, так как он выдерживает заданное скольжение. Ограничением крутящего момента на низах, служит сопростивление провода обмоток статора, а если точнее то потери на обмотках при попытке достичь той же индукции поля, при пониженном напряжении питания. Когда частота вращения поля низкая, то на двигатель подается напряжение сильно ниже номинального и больше сказывается влияние оммического сопротивления обмоток. Это равноценно тому, что сам закон V/f=const начинает меняться. Вместо константы в правой части уравнения появляется переменная величина, которая может быть к тому же нелинейной. Хороший векторный частотник знает как управляться с этой перменной, поэтому возможен высокий крутящий момент, даже на частоте порядка 1Гц. Хотя все это ценой повышенных потерь, то есть пониженного КПД двигателя. Тут ничего не поделать это недостатки асинхронного привода.
Вот блин, затронул только самое главное в общих чертах, даже не трогал двигатели с переключением полюсов, а сколько текста уже. Если же вдаваться в детали, то можно целую книгу написать. Так что всяких педантов, прошу понять, что всех деталей нельзя упомянуть в одном посте и выясняя их можно на сотни страниц разойтись.
Если публике будет интересно, то мое темнейшество может осветить вопрос торможения асинхронника, когда он переходит в режим генератора.
Асинхронный двигатель регулировка оборотов
Асинхронный двигатель регулировка оборотов
Управление скоростью вращения однофазных двигателей
Однофазные асинхронные двигатели питаются от обычной сети переменного напряжения 220 В.
Наиболее распространённая конструкция таких двигателей содержит две (или более) обмотки — рабочую и фазосдвигающую. Рабочая питается напрямую, а дополнительная через конденсатор, который сдвигает фазу на 90 градусов, что создаёт вращающееся магнитное поле. Поэтому такие двигатели ещё называют двухфазные или конденсаторные.


Регулировать скорость вращения таких двигателей необходимо, например, для:
- изменения расхода воздуха в системе вентиляции
- регулирования производительности насосов
- изменения скорости движущихся деталей, например в станках, конвеерах
В системах вентиляции это позволяет экономить электроэнергию, снизить уровень акустического шума установки, установить необходимую производительность.
Рассматривать механические способы изменения скорости вращения, например редукторы, муфты, шестерёнчатые трансмиссии мы не будем. Также не затронем способ изменения количества полюсов обмоток.
Рассмотрим способы с изменением электрических параметров:
- изменение напряжения питания двигателя
- изменение частоты питающего напряжения
Регулирование напряжением
Регулирование скорости этим способом связано с изменением, так называемого, скольжения двигателя — разностью между скоростью вращения магнитного поля, создаваемого неподвижным статором двигателя и его движущимся ротором:
n1 — скорость вращения магнитного поля
n2 — скорость вращения ротора
При этом обязательно выделяется энергия скольжения — из-за чего сильнее нагреваются обмотки двигателя.
Данный способ имеет небольшой диапазон регулирования, примерно 2:1, а также может осуществляться только вниз — то есть, снижением питающего напряжения.
При регулировании скорости таким способом необходимо устанавливать двигатели завышенной мощности.
Но несмотря на это, этот способ используется довольно часто для двигателей небольшой мощности с вентиляторной нагрузкой.
На практике для этого применяют различные схемы регуляторов.
Автотрансформаторное регулирование напряжения
Автотрансформатор — это обычный трансформатор, но с одной обмоткой и с отводами от части витков. При этом нет гальванической развязки от сети, но она в данном случае и не нужна, поэтому получается экономия из-за отсутствия вторичной обмотки.

На схеме изображён автотрансформатор T1, переключатель SW1, на который приходят отводы с разным напряжением, и двигатель М1.
Регулировка получается ступенчатой, обычно используют не более 5 ступеней регулирования.
 Преимущества данной схемы:
Преимущества данной схемы:
- неискажённая форма выходного напряжения (чистая синусоида)
- хорошая перегрузочная способность трансформатора
 Недостатки:
Недостатки:
- большая масса и габариты трансформатора (зависят от мощности нагрузочного мотора)
- все недостатки присущие регулировке напряжением


Тиристорный регулятор оборотов двигателя
В данной схеме используются ключи — два тиристора, включённых встречно-параллельно (напряжение переменное, поэтому каждый тиристор пропускает свою полуволну напряжения) или симистор.

Схема управления регулирует момент открытия и закрытия тиристоров относительно фазового перехода через ноль, соответственно «отрезается» кусок вначале или, реже в конце волны напряжения.
Таким образом изменяется среднеквадратичное значение напряжения.
Данная схема довольно широко используется для регулирования активной нагрузки — ламп накаливания и всевозможных нагревательных приборов (так называемые диммеры).
Ещё один способ регулирования — пропуск полупериодов волны напряжения, но при частоте в сети 50 Гц для двигателя это будет заметно — шумы и рывки при работе.
Для управления двигателями регуляторы модифицируют из-за особенностей индуктивной нагрузки:
- устанавливают защитные LRC-цепи для защиты силового ключа (конденсаторы, резисторы, дроссели)
- добавляют на выходе конденсатор для корректировки формы волны напряжения
- ограничивают минимальную мощность регулирования напряжения — для гарантированного старта двигателя
- используют тиристоры с током в несколько раз превышающим ток электромотора
Достоинства тиристорных регуляторов:
- низкая стоимость
- малая масса и размеры
- можно использовать для двигателей небольшой мощности
- при работе возможен шум, треск, рывки двигателя
- при использовании симисторов на двигатель попадает постоянное напряжение
- все недостатки регулирования напряжением
Стоит отметить, что в большинстве современных кондиционеров среднего и высшего уровня скорость вентилятора регулируется именно таким способом.
Транзисторный регулятор напряжения
Как называет его сам производитель — электронный автотрансформатор или ШИМ-регулятор.
Изменение напряжения осуществляется по принципу ШИМ (широтно-импульсная модуляция), а в выходном каскаде используются транзисторы — полевые или биполярные с изолированным затвором (IGBT).
Выходные транзисторы коммутируются с высокой частотой (около 50 кГц), если при этом изменить ширину импульсов и пауз между ними, то изменится и результирующее напряжение на нагрузке. Чем короче импульс и длиннее паузы между ними, тем меньше в итоге напряжение и подводимая мощность.
Для двигателя, на частоте в несколько десятков кГц, изменение ширины импульсов равносильно изменению напряжения.
Выходной каскад такой же как и у частотного преобразователя, только для одной фазы — диодный выпрямитель и два транзистора вместо шести, а схема управления изменяет выходное напряжение.
Плюсы электронного автотрансформатора:
- Небольшие габариты и масса прибора
- Невысокая стоимость
- Чистая, неискажённая форма выходного тока
- Отсутствует гул на низких оборотах
- Управление сигналом 0-10 Вольт
- Расстояние от прибора до двигателя не более 5 метров (этот недостаток устраняется при использовании дистанционного регулятора)
- Все недостатки регулировки напряжением
Частотное регулирование
Ещё совсем недавно (10 лет назад) частотных регуляторов скорости двигателей на рынке было ограниченное количество, и стоили они довольно дорого. Причина — не было дешёвых силовых высоковольтных транзисторов и модулей.
Но разработки в области твердотельной электроники позволили вывести на рынок силовые IGBT-модули. Как следствие — массовое появление на рынке инверторных кондиционеров, сварочных инверторов, преобразователей частоты.
На данный момент частотное преобразование — основной способ регулирования мощности, производительности, скорости всех устройств и механизмов приводом в которых является электродвигатель.
Однако, преобразователи частоты предназначены для управления трёхфазными электродвигателями.
Однофазные двигатели могут управляться:
- специализированными однофазными ПЧ
- трёхфазными ПЧ с исключением конденсатора
Преобразователи для однофазных двигателей
В настоящее время только один производитель заявляет о серийном выпуске специализированного ПЧ для конденсаторных двигателей — INVERTEK DRIVES.
Это модель Optidrive E2
Для стабильного запуска и работы двигателя используются специальные алгоритмы.
При этом регулировка частоты возможна и вверх, но в ограниченном диапазоне частот, этому мешает конденсатор установленный в цепи фазосдвигающей обмотки, так как его сопротивление напрямую зависит от частоты тока:
f — частота тока
С — ёмкость конденсатора
В выходном каскаде используется мостовая схема с четырьмя выходными IGBT транзисторами:
Optidrive E2 позволяет управлять двигателем без исключения из схемы конденсатора, то есть без изменения конструкции двигателя — в некоторых моделях это сделать довольно сложно.
Преимущества специализированного частотного преобразователя:
- интеллектуальное управление двигателем
- стабильно устойчивая работа двигателя
- огромные возможности современных ПЧ:
- возможность управлять работой двигателя для поддержания определённых характеристик (давления воды, расхода воздуха, скорости при изменяющейся нагрузке)
- многочисленные защиты (двигателя и самого прибора)
- входы для датчиков (цифровые и аналоговые)
- различные выходы
- коммуникационный интерфейс (для управления, мониторинга)
- предустановленные скорости
- ПИД-регулятор
Минусы использования однофазного ПЧ:
- ограниченное управление частотой
- высокая стоимость
Использование ЧП для трёхфазных двигателей
Стандартный частотник имеет на выходе трёхфазное напряжение. При подключении к ему однофазного двигателя из него извлекают конденсатор и соединяют по приведённой ниже схеме:
Геометрическое расположение обмоток друг относительно друга в статоре асинхронного двигателя составляет 90°:
Фазовый сдвиг трёхфазного напряжения -120°, как следствие этого — магнитное поле будет не круговое , а пульсирующее и его уровень будет меньше чем при питании со сдвигом в 90°.
В некоторых конденсаторных двигателях дополнительная обмотка выполняется более тонким проводом и соответственно имеет более высокое сопротивление.
При работе без конденсатора это приведёт к:
- более сильному нагреву обмотки (срок службы сокращается, возможны кз и межвитковые замыкания)
- разному току в обмотках
Многие ПЧ имеют защиту от асимметрии токов в обмотках, при невозможности отключить эту функцию в приборе работа по данной схеме будет невозможна
- более низкая стоимость по сравнению со специализированными ПЧ
- огромный выбор по мощности и производителям
- более широкий диапазон регулирования частоты
- все преимущества ПЧ (входы/выходы, интеллектуальные алгоритмы работы, коммуникационные интерфейсы)
- необходимость предварительного подбора ПЧ и двигателя для совместной работы
- пульсирующий и пониженный момент
- повышенный нагрев
- отсутствие гарантии при выходе из строя, т.к. трёхфазные ПЧ не предназначены для работы с однофазными двигателями