Сонары что это такое в автомобиле?
Все о радаре и сонаре

Иногда, когда соблюдены определенные условия, Вы можете услышать собственное эхо. Если Вы крикните «Привет!», звук может отразиться от большого объекта, и Вы услышите собственный голос. Это и называется эхо. Морской радар и сонар – это электронные устройства, которые используют принцип эхо для обнаружения и локализации объекта.
Оба устройства — и радар, и сонар — определяют объект по эхо-сигналу, который отразился от объекта. Радар использует радиоволны, которые являются типом электромагнитной энергии. Сонар использует принцип эхо, посылая звуковые волны под воду или сквозь человеческое тело. Звуковые волны — это тип акустической энергии. Из-за различия типов энергии, используемых в радаре и сонаре, каждый из них имеет своё собственное применение.
Что такое радар?

Слово «Радар» («Radar») было образовано от английского словосочетания «radio detection and ranging»(«радиообнаружение и дальность»). Радиоволны представляют собой тип электромагнитного излучения (микроволновые печи, рентгеновские лучи и световые волны другого типа). Это основа данной технологии. Дальность означает измерение расстояния до цели от РЛС (устройство, которое отправляет радиосигнал и принимает обратно его отражение).
Радар использует радиоволны. Похожая система называется «оптический радар» или «лидар» («lidar» — от англ. «light detection and ranging» — «световое обнаружение и дальность»), которая основывается на том же принципе, что и радар, но использует световые волны.
Как радар работает

РЛС (также называемые радиолокационными станциями) бывают разных размеров, в зависимости от тех целей, где их используют. Но все они состоят из четырех основных частей: передатчика, антенны, приемника и дисплея. Передатчик испускает радиоволны. Когда радиоволна доходит до объекта, например самолета, она отражается обратно к станции. Антенна обнаруживает отраженный сигнал и отправляет на приемник, который его увеличивает и усиливает. Затем, сигнал отправляется на дисплей как изображение.
Выглядит изображение, обычно, как схематичная карта типа «вид сверху». На дисплее отображаются яркие пятна, назовем их всплески. Всплески показывают участки суши, а также различные объекты — такие как самолеты, корабли и т.д. Оператор может выбрать эти объекты, так как они находятся в движении, тогда как земля неподвижна.
Основной тип радара — импульсный радар. Он отправляет радиоволны короткими очередями или импульсами. Расстояние до цели определяется временем, за которое сигнал доходит до цели и возвращается обратно. Скорость радиосигнала сравнима со скоростью света и составляет 300 000 км/с. Соответственно, если сигнал возвращается за 1/1000 секунды, проходит расстояние в 300 км, то цель должна быть на половине пройденного расстояния, т.е. в 150 км удаленности.
Импульсная передача позволяет определить расстояние более точно. Почему это так? Представьте себе, как Вы кричите, чтобы услышать эхо. Если Вы кричите продолжительное время, то первые слова вернутся прежде, чем Вы закончите, и Вы не сможете услышать все предложение. Но если Вы крикните что-то короткое, то без проблем распознаете свое эхо.
Расположение цели по отношению к РЛС определяется немного иначе. Радарная антенна отправляет импульсы узким лучом, примерно как светит фонарь. Антенна и, соответственно, луч вращается медленно и проходит через все возможные препятствия в поисках целей. Сигнал отражается от корабля или какой-либо другой цели, только если луч задел её. Возвращенный сигнал усиливается приемником и отображается на мониторе, где показывается расстояние и направление до цели.

Применение радара
Радар применяется как в военных, так и в гражданских целях. Наиболее распространенное применение в гражданских целях — это помощь в навигации для морских и воздушных судов. РЛС, установленные на судах или в аэропорту, собирают информацию о других объектах, чтобы предотвратить возможные столкновения. На море собирается информация о буях, скалах и т.д. В воздухе РЛС помогают заходить на посадку воздушным судам, в условиях плохой видимости или неисправности.
Также радары используются в метеорологии, при прогнозировании погодных условий. Синоптики, как правило, используют их в сочетании с лидаром (оптическим радаром) для изучения штормов, ураганов и других погодных катаклизмов. Доплеровский радар основывается на принципе эффекта Доплера – т. е. изменение частоты и длины волны для наблюдателя (приемника) из-за движения источника излучения или наблюдателя (приемника). Анализируя изменения частоты отраженных радиоволн, доплеровский радар может отслеживать движение штормов и развитие торнадо.
Ученые используют радары, чтобы отслеживать миграцию птиц и насекомых, определять расстояние до планет. Потому как он может показать в каком направлении и как быстро движется объект, радар используется полицией для определения нарушений скоростного режима. Подобные технологии используются в спорте, например в теннисе, чтобы определить скорость подачи. Радар используют спецслужбы, чтобы сканировать объекты. В военных целях радары, в большей степени, применяют в качестве поиска целей и управления огнем.
История радара
История радарной технологии началась с экспериментов с использованием радиоволн немецким физиком Генрихом Герцом в 1887 году. Он обнаружил, что волны могут проходить через одни объекты, но отражаться другими. В 1900 году Никола Тесла заметил, что крупные объекты могут отражать достаточно сильные сигналы. Он понял, что волны были отраженными радиосигналами, и предсказал, что они могут быть использованы для поиска положения и направления судов в открытом море.
Впервые импульсный радар был представлен в США в 1925 году. В 1935 году радар был запатентован в британском патентном бюро как результат исследований во главе с шотландским физиком Робертом Александром Уотсон-Уоттом. Этот запатентованный радар был применен в радарных системах, которые оказались эффективны против немецкой авиации во время воздушных налетов на Великобританию, в период Второй мировой войны.(1939-1945 г.г.) Термин «радар» был впервые использован учеными ВВС США во время этой войны.
Прогресс в сфере радарных технологий продолжается до сих пор, усилия направлены на улучшение качества изображения, точности размера и снижения стоимости.

Что такое сонар?
Слово «сонар» происходит от англ. «sound navigation and ranging». Сонар может обнаруживать и определять местоположение объектов в толще воды при помощи эхо, аналогично дельфинам и другим морским животным, которые используют принцип эхолокации.
Как сонар работает
Есть два типа сонара: активный и пассивный. Активный отправляет импульсы и затем принимает отраженный сигнал эхо. Пассивный принимает сигнал, без отправки собственного. В активных гидроакустических системах звуковые сигналы намного мощнее, чем обычные звуки. Каждый импульс длится доли секунды.
Некоторые сонары излучают звуки, которые Вы можете услышать. Другие сигналы настолько высоки, что человеческое ухо не в силах их воспринять. Такие сигналы называются ультразвуковыми волнами (за пределами звука). У сонара имеется собственный приемник, который способен принять возвращенный эхо-сигнал. Положение объектов под водой можно определить по разнице между отправкой и приемом звукового сигнала.
Применение сонара
Сонар имеет множество применений. Подводные лодки используют сонар для обнаружения других судов. Технологию применяют для измерения глубин (эхолот). Эхолот измеряет время, необходимое для звукового импульса, чтобы достичь дна водоема и вернуться обратно. Рыболовные суда используют эхолот или гидролокатор для поиска стай рыб.

Океанографы используют сонар, чтобы отобразить контуры дна водоема. Звуковые сигналы могут пробивать толщу дна сквозь ил и песок и отрисовать слой породы под ними. Сигнал затем возвращается, давая расстояние до твердой поверхности.
Тот же принцип используется при поиске нефти на суше. Сонар отправляет импульс сквозь землю, импульс отражается с различной частотой от разных слоев почвы, и геологи могут определить какие виды грунта и пород присутствуют в почве. Это помогает определить места бурения, которые, скорее всего, содержат природные ресурсы. Это называется сейсморазведка.
Особый вид сонара используется в медицине и называется УЗИ (ультразвуковое исследование) или эхоскопия. Звуковые волны разной частоты производят различное эхо при отражении от разных органов тела. Врачи научились использовать эти сигналы, чтобы определять заболевания или контролировать развитие ребенка в утробе матери.
Звуковые волны очень высокой частоты используют в медицине и промышленности для чистки поверхностей от мельчайших инородных частиц.
История сонара
Сонар изобрела природа, задолго до того, как об этом задумался человек. Например, летучие мыши летают в темноте. Обходя препятствия и находя добычу при помощи ультразвуковых волн, которые человек услышать не в состоянии.
В 1906 году, американский военно-морской архитектор Льюис Никсон изобрел первый сонар для поиска айсбергов. Во время Второй мировой войны интерес к этой технологии возрос, т.к. возникла необходимость в обнаружении подводных лодок противника. В 1915 году такую первую действующую модель изобрел французский физик Поль Ланжевен. Первые приборы могли только слушать сигналы, но не могли излучать. Но уже к 1918 году Великобритания и Соединенные Штаты произвели образцы, которые могли отправлять сигнал и получать его обратно. Так же, как и с радарными технологиями, технологии сонаров постоянно совершенствуются и по сей день. Например, в 2000-х годах ВМС США ввели в оборот сонары, которые чистили военные мины.
avtoexperts.ru
Новичкам-автолюбителям на первых порах бывает нелегко совладать с парковкой не только задним, но и передним ходом. А все потому, что начинающий автолюбитель еще не знает досконально габаритов своего автомобиля и не может правильно определить, когда следует остановить машину, чтобы не задеть препятствие (высоко расположены бордюр, колышек или стоящее по соседству авто). Из-за этого, как свидетельствует статистика, происходит масса мелких ДТП. Чтобы их избежать и помочь новичкам еще в 1990-х годах инженеры компаний Mercedes-Benz, BMW и Audi стали оснащать свои модели парковочными сонарами. О том, что это такое, какими бывают парковочные сонары, пойдет речь в этой статье.
Принцип действия парктроника
Сами по себе парковочные сонары (парктроники или акустические парковочные системы) — это специальные ультразвуковые датчики, основная функция которых заключается в сканировании при помощи звуковых волн территории вокруг автомобиля, обнаружении имеющихся на ней препятствий и заблаговременного оповещения о них водителя при помощи звуковых или визуальных сигналов (в некоторых устройствах способ оповещения комбинированный).
Если говорить языком физики, то каждый сонар излучает звуковую волну частотой в 40 кГц, которая распространяется в пространство, отражается от имеющихся там препятствий, отражается от них, возвращается, принимается блоком управления. Там эта информация анализируется и выводится на устройство индикации. Таким образом, водитель видит, что на расстоянии от 3 метров (максимальное расстояние действия звуковой волны сонара) находится какое-то препятствие.
Чем ближе автомобиль к этому препятствию, тем интенсивнее становится звуковое и/или визуальное оповещение водителя. Парковочная система, состоящая из задних сонаров, активируется при движении автомобиля задним ходом (с момента включения задней передачи). В системе, где есть передние сонары, она активируется при движении вперед на скорости до 20 км/час.
Из чего состоит парковочная система
Стандартная парковочная система состоит из ультразвукового датчика, электронного блока управления и устройства индикации (монитор, на который выводится информация о расстоянии, оставшемся до препятствия). В зависимости от количества ультразвуковых датчиков различают двойные, четверные, шестерные и восьмерные парковочные системы. Самая простейшая система – двойная, которая состоит из двух парковочных сонаров, блока управления и устройства индикации. При этом сонары устанавливаются в задний бампер. Остальные системы различаются только количеством сонаров, при этом шестерные системы предполагают установку четырех сонаров в задний бампер и двух – в передний. Восьмерная система, соответственно, предполагает установку четырех сонаров в передний бампер и столько же – в задний.
По виду монтажа, парковочные сонары делятся на врезные (врезаются в бамперы) и накладные (крепятся на бампер).
Блок управления парковочной системой устанавливается в салоне автомобиля. Там же монтируется и индикатор, на который подается информация от сонаров. Такие индикаторы делятся на два типа: встроенные и выносные. Встроенные индикаторы, как правило, монтируются в зеркала заднего вида. Выносные индикаторы можно монтировать где угодно в салоне автомобиля, но зачастую их устанавливают на торпедо.
Некоторые производители устанавливают парковочные системы еще на заводе.
Но большинство автомобильных брендов такими устройствами свои машины не оснащают, потому автовладельцам приходится их приобретать самостоятельно. В зависимости от надобности, можно купить парковочную систему с любым количеством сонаров, но важно помнить, что чем их больше, тем точнее система определить наличие препятствия и расстояние до него.
Достоинства и недостатки парктроников
Как и у каждой системы, у парктроников есть свои плюсы и минусы. Главное, что должен помнить водитель – слепо полагаться на точность показаний парковочных сонаров нельзя. Парктроники являются только оповестительными системами, но и они могут допускать ошибки.
Плюсы парктроника очевидны – это оповещение водителя о наличии препятствия на территории парковки.
Минусы парктроника – в неточности информации, которую могут передавать сонары на индикаторное устройство. Неточности эти могут возникать при следующих условиях
— при загрязнении сонаров;
— при движении по пересеченной местности;
— при наличии на территории парковки источников сильного шума;
— при сильных осадках;
Помимо этого, паркторник может не обнаружить некоторые предметы, такие как тросы, тонки столбики, цепи. Не «видит» парковочная система ямы на дорогах, открытые канализационные люки.
Помимо парктроников, автомобили могут оснащаться камерами заднего вида, которые тоже принадлежат к парковочным системам. Однако камеры заднего вида только передают изображение пространства позади автомобиля на мультимедийный экран, без индикации расстояния, оставшегося до препятствия. Если же камера оснащается системой интеллектуальной парковки (с парковочными линиями), то водитель может видеть траекторию движения машины и узнать, сколько осталось до препятствия. Идеальный вариант парковочной системы – это совмещение парктроников с камерой заднего вида.
Что такое гидролокатор?







Гидролокатор, или сонар (от английского sonar, Sound Navigation And Ranging — определение местоположения и дальности с помощью звуковых волн) — аппаратурный гидроакустический комплекс для определения с помощью акустических сигналов положения неподвижных и плавучих объектов, полностью или частично находящихся под водой. Работа таких приборов основана на принципах гидроакустики — раздела акустики, в котором изучаются особенности распространения, отражения и затухания звуковых волн в реальной водной среде, в основном с целью локации и связи.
Звуковые волны являются единственным эффективным средством передачи и получения информации под водой. Например, электромагнитные волны сильно поглощаются водной средой, поэтому использование распространенного в других сферах радиоканала под водой невозможно. Из всех известных до настоящего времени видов энергии звуковая энергия распространяется в воде на наибольшее расстояние.

Как изобрели гидролокатор?
В «Акустическом журнале» — издании Российской академии наук — рассказывается, что становление гидроакустики началось еще с Аристотеля, который первым заметил, что звук можно слышать в воде так же, как и в воздухе.
В 1490 году итальянский ученый и художник Леонардо да Винчи писал в своих трудах: «Если остановить корабль и погрузить конец длинной трубки в воду, а другой конец поднести к уху, вы услышите корабли, находящиеся на больших расстояниях». Сейчас провести такой эксперимент будет сложнее, так как с тех пор уровень шума в морях значительно возрос: стало больше судов, ведутся различные подводные работы и т. д.
Приблизительно через 100 лет после Леонардо английский философ Фрэнсис Бэкон выдвинул идею о том, что вода является основной средой, распространяясь в которой зародившийся в ней звук достигает наблюдателя, находящегося рядом. После этого несколько веков в данном вопросе не было значительных продвижений. Лишь в 1826 году швейцарский физик Жан-Даниэль Колладон и французский математик Жак Шарль Франсуа Штурм в ходе эксперимента на Женевском озере смогли измерить скорость звука в воде при температуре 8 °C, которая оказалась равна 1 435 м/с. Это примерно на 3 м/с меньше значения, принятого в наше время.
В последние годы XIX века на плавучих маяках широко внедрялись подводные колокола, звук от которых мог регистрироваться на больших расстояниях с помощью стетоскопа или простых микрофонов, установленных на корпусе судна. Американский инженер-электрик Элиша Грей, работавший вместе с Эдисоном над улучшением телефона, обнаружил, что угольный микрофон в соответствующем водонепроницаемом кожухе может использоваться как гидрофон для приема сигналов подводного колокола. В 1899 году Грей и А. Дж. Мунди получили патент на электрический колокол для передачи подводных сигналов.
В 1914 году процесс эхолокации, известный также как дальнометрия с помощью отраженных сигналов, был достаточно разработан, чтобы обнаруживать айсберги на расстоянии 3,2 км. Начало Первой мировой войны простимулировало дальнейшее развитие гидроакустики. Во Франции русский инженер-электротехник Константин Шиловский совместно с французским физиком Полем Ланжевеном работал над прибором, включавшим в себя конденсаторный прожектор и угольный микрофон, размещенный в фокусе вогнутого акустического зеркала. В 1916 году они подали заявку на патент. В том году им удалось передать сигнал под водой на расстояние 3 км и зарегистрировать отражение от железной пластины на расстоянии 100 м.

После получения патента Шиловский прекратил работу над проектом, и ее продолжил Ланжевен. В 1917 году он обратил внимание на пьезоэлектрический эффект, открытый Жаком и Пьером Кюри в 1880 году, при разработке передатчика и приемника под водой. Для своего кварцевого приемника Ланжевен использовал недавно разработанный электроламповый усилитель и в 1918 году завершил работу над преобразователем на основе слоев сталь-кварц-сталь. Он смог увеличить расстояние односторонней передачи до 8 км.
Развитие компьютерных технологий после 1960-х годов сформировало основу для практически взрывного прогресса гидроакустики. Поэтому современные гидролокаторы значительно отличаются от приборов, которые появились до 1960-х, и тем более от устройств, созданных Шиловским и Ланжевеном.
Как работает гидролокатор?
Главные элементы гидролокатора — подводный излучатель, создающий звуковую волну, и приемник (гидрофон), принимающий отраженный эхосигнал. Принятые сигналы поступают на индикаторные приборы: рекордер, электродинамический громкоговоритель, телефоны, электронно-лучевую трубку. На рекордере измеряется и регистрируется электрохимическим способом на ленте расстояние до объекта. С помощью телефонов и электродинамического громкоговорителя принятые сигналы прослушиваются на звуковой частоте и классифицируются. На электронно-лучевой трубке высвечивается сигнал от объекта и измеряется дистанция до него и направление.
Какие бывают гидролокаторы?
Гидролокаторы по принципу работы делятся на два типа: активные и пассивные.
Активные излучают звуковой сигнал, который отражается от цели и возвращается в приемник. Поскольку скорость звука в воде всегда примерно одинаковая (1,5 км/с), определив время между отправкой сигнала и его возвращением в виде эха, можно рассчитать расстояние до объекта.

Пассивные принимают звуковые сигналы, которые издает сама цель. Поскольку рыба издает слишком слабые звуковые сигналы, пассивную гидролокацию для ее поиска почти не используют. Чаще всего такие приборы применяют в исследовательских целях.
Виды гидролокаторов по способу сканирования
Согласно Большой российской энциклопедии, классификация гидролокаторов по способу сканирования включает три вида:
- Гидролокаторы с секторным обзором — излучают звуковые волны в заданном секторе. Сигнал принимает узконаправленная антенна в нескольких направлениях в пределах сектора.
- Гидролокаторы с круговым обзором — и излучение волн, и прием эха осуществляются по полному кругу, что значительно ускоряет сбор информации.
- Гидролокаторы с шаговым обзором — изучают и принимают циклически. В каждом цикле изучение ведется лишь в одном направлении, после чего антенна смещается на «шаг» и сканирует новую область. Одной из разновидностей таких приборов является гидролокатор бокового обзора, который сканирует сразу большую область сбоку от судна.
Особняком стоят эхолоты. Это упрощенный вариант гидролокатора с узконаправленным сканированием, ориентированным на морское дно. Отражаемые ото дна звуковые сигналы автоматически регистрируются в цифровой или аналоговой форме на карте.

Для чего используют гидролокаторы?
На подводных лодках приборы используют для сбора информации об окружающей среде и навигации. Иногда гидролокаторами оснащают рыболовные суда, чтобы обнаруживать косяки рыб, а биологи с помощью этих приборов изучают звуки, издаваемые морскими обитателями.
Гидролокаторы кругового и секторного обзора также используют для построения охранных зон и периметров. Такие приборы устанавливаются при входе в гавани и порты, на нефтяных платформах. Переносные приборы нередко применяются водолазами. Гидролокаторы бокового обзора полезны для прокладки и обслуживания подводных кабелей связи и трубопроводов.
Что такое CHIRP на эхолоте?
Что такое CHIRP на эхолоте? Одна из главных претензий к традиционным сонарам заключается в том, что они генерируют импульс энергии, который имеет очень высокую мощность, но малое количество самих импульсов. Из-за этого они имеют тенденцию ограничивать количество энергии, которую они передают в толщу воды.
Но что, если я скажу вам, что есть режим, который не только посылает более длинный импульс и вкладывает больше энергии в толщу воды, но также генерирует чистую широкополосную частоту.
Да, мы говорим про режим эхолота CHIRP. Эта статья даст вам четкое представление о том, что такое эхолот CHIRP, и о том, как он может увеличить эффективность вашей рыбалки.
Что такое CHIRP?
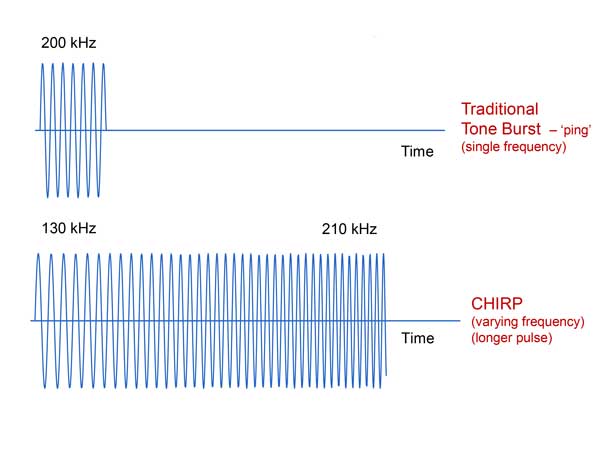
Проще говоря, CHIRP на эхолоте — это сжатый высокоинтенсивный излучаемый импульс, который посылает высокую энергию импульса в толщу воды. Это позволяет генерировать изображения с использованием полного диапазона частот.
CHIRP улучшает отслеживание дна на более высоких глубинах и с более высокой скоростью. Он обеспечивает четкое и точное определение находящихся близко друг к другу объектов и дает вам точное представление изображения, которое вы видите.
Как работает CHIRP?
В отличие от традиционных 2D-сонаров, которые специализируются на использовании одной частоты, сонар CHIRP умнее и лучше. Он использует изменяемый диапазон или пакеты различных частот, чтобы позволить датчику сначала работать на низкой частоте, а затем модулировать более высокие импульсы, которые в десять раз превышают длительность импульса. Таким образом, в толщу воды передается от 10 до 60 раз больше энергии.
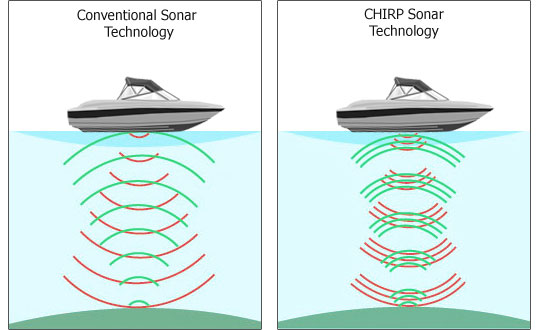
Одной из важнейших особенностей сонара CHIRP, который делает его настолько блестящим по сравнению с другими, является «Сжатие импульсов и корреляция паттернов». Используя эту функцию, CHIRP на эхолоте может быстро получать и обрабатывать обширную информацию, полученную от каждого импульса, для достижения беспрецедентного разрешения и четкого определение целей.
Еще одним приятным моментом в отношении сжатия импульсов и корреляции паттернов в сонаре CHIRP является то, что он может быстро преобразовывать расширенный частотно-кодированный импульс в ограниченный импульс с расширенной амплитудой.
Этот ограниченный импульс с увеличенной мощностью может быть связан с расширенным импульсом с низкой пиковой мощностью, чтобы улучшить разрешение по дальности и улучшить соотношение сигнал / шум.
Это позволит устройству легко извлекать цель из фонового шума. Другими словами, CHIRP будет обеспечивать сканирование на больших глубинах с лучшим разделением целей и уменьшением помех в толще воды.
Высокий CHIRP vs Средний CHRIP
CHIRP-эхолот делится на высокие, средние частоты. Итак, какие частоты CHIRP вы должны выбрать?
Высокий CHRIP
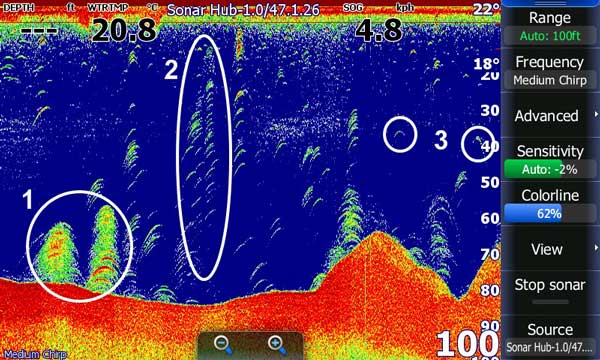
Высокий CHIRP (150-240 кГц) больше подходит для пресной воды и на глубинах менее 200 метров. Он поможет вам найти, идентифицировать и выследить рыбу вблизи дна.
Средний CHIRP
Средний CHIRP (80-160 кГц) отлично подходит для сканирования более обширных областей, а также показывает более массивные арки рыб. Тем не менее, он может обеспечивает меньше деталей по сравнению с высоким CHIRP при сканировании небольших объектов.
Традиционный сонар против Downscan против CHIRP?
Итак, вопрос, который задают многие, — что выбрать между традиционным эхолотом, Downscan или CHIRP? Какой из трех вариантов лучше для рыбы, структуры и контуров дна?
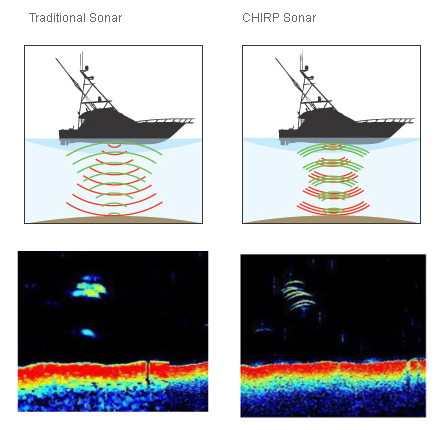
Традиционный сонар
Традиционный гидролокатор — это отличный инструмент, позволяющий детально показывать рыбу на экране. Хотя это и правда, недостаток традиционных сонаров в том, что они не показывают реалистичную картину того, что находится под лодкой.
Поэтому иногда вы можете увидеть сапог, ловушки для крабов, старые удочки и другие отвлекающие предметы, не зная, что они не рыба.
DownScan Sonar
Сонар для нижнего сканирования, с одной стороны, показывает вам точную картину того, что находится на дне лодки. Он дает вам точную информацию об отдельных рыбах в траве, обломках корабля на дне или обо всем, что может скрыть рыбу.
Таким образом, с DownScan, вы не будете тратить свое время на то, что вы не cможете поймать.
Недостаток эхолота с нижним сканированием состоит в том, что он показывает объекты фактического размера, и есть вероятность, что вы можете пропустить нужные, если не будете уделять им пристальное внимание.
CHIRP
В то время как традиционный эхолот и DownScan великолепно показывают уникальное представление рыбы, гидролокатор CHIRP переворачивает игру.
Использование эхолота с CHIRP не только покажет вам наиболее четкие изображения под вашей лодкой, но также позволит вам увидеть четкую структуру и даст вам яркое определение объектов рыбы по сравнению с обычным или традиционным сканированием.
Нужен ли CHIRP Sonar?
CHIRP эхолот является значительным шагом вперед в соотношении производительности и функций. CHIRP в эхолоте даст вам преимущество в разделении целей.
Кроме того, наличие CHIRP датчика уменьшит шум и увеличит разрешение изображений. Вам нужен эхолот, который быстро получит и обработает обширную информацию в четких деталях для получения беспрецедентного разрешения и четкого определения целей? Тогда CHIRP для поиска рыбы — это то, что вам нужно.
Как работают сонары

Как работают сонары
Понимание принципов работы сонара и того, как читать его данные может стать ключом к успешной рыбалке. Наше короткое руководство о том, как работают сонары, научит Вас основам поиска рыбы эхолотом и даст несложные советы по чтению показаний эхолота.

SONAR аббревиатура от “ SOund NAvigation Ranging ” что в переводе означает «Звук, Навигация, Определение расстояния». Сонар посылает импульсы звуковых волн сквозь воду. Когда эти импульсы достигают таких объектов как рыба, растительность или дно, они отражаются обратно на поверхность. Сонар измеряет, сколько времени требуется, чтобы звуковая волна достигла обьектаи затем вернулсась обратно. Это тот же принцип, который используют дельфины и летучие мышы. Эта информация позволяет судить о глубине отраженного объекта. Он также измеряет силу возвращаемого импульса — чем тверже объекты, тем сильнее обратный импульс.
Как только получен возвращаемый импульс, отсылается другой. Поскольку звуковые волны движутся со скоростью в одну милю в секунду, сонары могут посылать несколько импульсов в секунду. Deeper PRO, Deeper PRO +, Deeper CHIRP+ и Deeper CHIRP+ 2 отправляют 15 импульсов в секунду. Возвращающиеся звуковые импульсы преобразуются в электрические сигналы, а затем отображаются, позволяя рыболовам определять глубину и твердость дна, а также любые объекты между ними.
4 пункта на заметку
Сонары сканируют конусообразно, а не линейно.
Прокрутка экрана не означает движение сонара (или большое количество рыбы).
Более толстые линии и повторные возвратные сигналы означают более плотное дно.
Расставьте дуги и вы найдете рыбу.
1. Сонары сканируют конусообразно, а не линейно

Когда мы читаем данные с нашего эхолота, мы обычно представляем, что информация, которую мы видим на нашем экране, описывает происходящее прямо под нашим сонаром. Таким образом, если мы видим рыбу на экране, мы думаем, что она должна быть точно под нашим сонаром. В действительности, показания, которые мы видим, взяты из более широкой области под нашим сонаром. И что еще более важно, сонар получает данные из более широкой области, в зависимости от того, насколько глубоко вы сканируете. Это происходит потому, что сонары сканируют конусообразно.

Как это работает
Сонары посылают звуковые импульсы для поиска объектов. Звук распространяется волнами, а не прямыми линиями, и эти волны расширяются конусообразно, становясь все шире и шире.
Большинство сонаров могут управлять конусами звуковых волн, изменяя частоту сканирующего луча. Это важно, потому что в разных промысловых ситуациях различные сканирующие лучи более или менее эффективны.
Широкое лучевое сканирование (обычно от 40 ° до 60 °) отлично подходит для быстрого сканирования больших площадей и получения общей информации о глубине и структуре дна, но точность и детали будут ниже. Широкое лучевое сканирование лучше всего подходит для более мелких вод, потому что чем шире конус покрывает область, тем глубже он сканирует. Это означает, что если вы сканируете на глубине 45 футов / 13,7 м, вы увидите объекты в радиусе 47 футов / 14,3 м.
Сканирование узким лучом (от 10 ° до 20 °) дает более точное изображение, но покрывает меньшую площадь. Это подходит для определения точного местоположения рыбы. Узкое лучевое сканирование также лучше подходит для большой глубины, так как конус не распространяется слишком широко.
Отражения от поверхности и «слепые» зоны

Есть один важный момент, связанный с шириной сканирующего луча, который следует принимать во внимание: в некоторых случаях эхолот не выявляет объекты, которые находятся сразу под поверхностью воды.
Это вызвано отражением волн от поверхности, возникающем при использовании любых эхолотов. Отражение от поверхности происходит потому, что близкая к поверхности вода отражает часть испускаемых эхолотом волн, и эти отражения возникают слишком быстро, мешая эхолоту правильно обработать данные. Отражения могут возникать по ряду причин; чаще всего это волны на поверхности воды, пузырьки, течение и водоросли. Они вызывают сильный гидроакустический шум возле поверхности. Из-за этого и появляются «слепые» зоны, в которых невозможно выявить рыбу.
Количество отражений и размер «слепых» зон можно снизить, повысив частоту сканирования при использовании эхолота. Если вы сталкиваетесь с отражениями от поверхности при работе с Deeper PRO или PRO+, переключитесь на сканирование на более высокой частоте (узкий луч 290 кГц 15°). Если у вас Deeper START, его частота эхолокации 120 кГц предполагает появление отражений от поверхности воды в глубину до 1 м / 3,3 фута.
Благодаря технологии CHIRP эхолоты Deeper CHIRP+ и CHIRP+ 2 имеют сниженный уровень шума и помех от поверхности, поэтому передают точные показания даже на глубине 15 см/6 дюймов от поверхности.

На рисунке ниже приведены 2 ситуации, в которых отражения от поверхности воды могут искажать показатели эхолота (в этих примерах глубина отражений может достигать 1 м / 3,3 фута вглубь):
- Рыба находится ниже зоны отражений от поверхности. В этом случае отражение испускаемых эхолотом волн от рыбы достаточно сильное, и эхолот выявляет ее местоположение (при использовании эхолота Fish Deeper приложение Deeper использует алгоритм, который определяет, рыба это или нет). В результате рыба отображается на экране приложения.
- Рыба находится взоне отражений от поверхности. Отражения волн эхолота от этой рыбы смешиваются с отражениями от поверхности воды, и силы сигнала становится недостаточно для выявления местоположения рыбы. В результате рыба не отображается на экране приложения.
Почему это играет роль при …
обнаружении рыбы
При обнаружения рыбы, не рассчитывайте, что каждая рыба, которую Вы отмечаете, находится прямо под вашим сонаром. Вместо этого помните, что они находятся где-то внутри конуса, распространяющегося вашим сонаром. И помните, чем больше глубина , тем шире область, в которой рыба может быть. Если рыба не глубоко, то она находится более или менее под вашим сонаром, особенно если вы используете узкий луч. Если же рыба глубоко, то она может находиться в гораздо более широкой области и намного дальше от расположения вашего сонара.
Совет от Deeper: при ловле рыбы сначала используйте широкий луч, чтобы найти общую область нахождения рыбы, затем переключитесь на узкий луч и просмотрите эту область несколько раз, чтобы получить точное местоположение.
определении структуры и особенностей
Еще один момент, который вы должны понять при поиске — это то, что именно называется мертвой зоной. Ваш сонар будет использовать первую обнаруженную частицу дна, которую он определяет как уровень маркировки дна на экране. Но если конус сканирует впадину, там может быть более глубокая секция, которая не поддается сканированию — эта область является мертвой зоной (см. Диаграмму).
Совет от Deeper: Использование узкого луча минимизирует вероятность того, что на вашем дисплее появится мертвая зона. Когда вы обнаружите впадину, просмотрите ее несколько раз, используя узкий луч.
2. Прокрутка экрана не означает движение сонара (или большое количество рыбы)

В Fish Deeper App и многие другие сонары отображают данные на экране с прокруткой справа налево. Справа на дисплее показываются самые последние данные, самые старые — слева. Вы должны помнить, что ваш дисплей будет продолжать прокручиваться, даже если ваш сонар неподвижен, потому что устройство постоянно отправляет и получает звуковые импульсы. Понимание того, как работает просмотр прокрутки действительно важно для понимания данных сонара, которые вы получаете.
Почему это имеет значение при …
обнаружении рыбы
Одной из самых частых ошибок при анализе данных полученных с сонара является принятие одной рыбы за большое количество рыб. Вот как это происходит. Вы определяете, что в воде есть неподвижная рыба. Если вы не переместите свой сонар, и рыба останется неподвижной, на экране вы увидите постоянный поток рыбных значков. Естественно Вы подумаете, что обнаружены 4 или 5 огромных монстров. На самом деле, есть только один, но прокручивающийся дисплей делает его похожим на несколько.
Совет от Deeper:Если вы обнаруживаете, что дисплей прокрутки ошибается, попробуйте добавить вертикальный индикатор мигалки (Настройки — Сонар — Вертикальный флешер: Вкл.). Это точно так же, как на дисплее Зимняя рыбалка, показано справа на дисплее. Этот дисплей представляет собой живой канал, который не прокручивается — он показывает, что происходит прямо сейчас под вашим сонаром.
определении структуры и особенностей
Представьте, что вы запустили свой сонар, и теперь вы тяните его обратно, чтобы получить образ подводной структуры. Прекратите тянуть его на несколько секунд, а затем начните снова. Впоследствии вы вернувшись к сканированию заметите явный уклон, но с одним плоским участком посередине. Итак, есть ли на самом деле плоский участок на дне?
Ответ — нет! Это происходит потому, что горизонтальная ось вашего дисплея показывает время, а не расстояние. «Плоская секция», которую вы видите, это когда вы перестали тянуть. Сонар продолжал сканирование и может показаться, что дно плоское, но на самом деле нет.
Совет от Deeper: Чтобы этого избежать, тяните сонар с одинаковой скоростью. Вместо этого вы можете использовать функции отображения с лодки или берега. Они используют GPS для добавления уровней глубины на вашу карту, поэтому нет проблем, если скорость, с которой вы тяните, меняется.